|
I am a Robotics Engineer at Paladin Drones (Y-Combinator S'18). I completed my M.S Robotics degree from Georgia Tech in May 2024. During summer 2023, I worked as a Robotics Software Engineer Intern at Bastian Solutions where I developed a ROS-based Auto-tuning software for autonomous forklifts. I have 3 years of work experience at Caterpillar Inc in the Power Systems and Controls Division. I completed my Bachelor's in Mechanical Engineering at the National Institute of Technology Karnataka (NITK), India. During my undergrad, I interned at Indian Institute of Technology Bombay under the guidance of Prof. Prasanna Gandhi, at Indian Institute of Space Science and Technology under Prof. Kurien Issac and at Mechanical Chef, a cooking-robot startup based in Bengaluru. I am a recipient of the JN Tata Endowment Scholarship for the Higher Education of Indians, NITK Institute Merit Scholarship, JEE Mains Scholarship, JASSO Scholarship from Japan Government, and a winner of the e-Yantra National Robotics Competition. |

|
|
|
Prajwal Bharadwaj, Nagarakshith M S, Sagar Bharadwaj, Samarth Bonthala Winners - eYantra National Robotics Competition 2017, IIT Bombay A wireless snake robot performing caterpillar, serpentine, sidewinding gaits. |
|
|
Bhavik Parmar, Prajwal Bharadwaj Advisor - Prof. Kurien Issac, Indian Institute of Space Science and Technology
8th International Engineering Symposium, Kumamoto University, Japan, 2019 |
|
|
Prajwal Bharadwaj,Abhinandan Krishnan,Yash Srivastava Robotarium, Georgia Tech Autonomous Take-off and Landing |
|
|
Prajwal Bharadwaj,Abhinandan Krishnan Advisor - Sean Thomas Wilson, Research Scientist, Georgia Tech
Georgia Tech Mobile Robotics Lab |
|
|
Arjun Sadanand, Nagarakshith M S, Prajwal Bharadwaj, K S S M Kamal ABU Robocon NITK 2019 Core Team A quadruped robot driven by leadscrew coupled with RRRP four-bar mechanism. |
|
|
Implemented Guided-backprop, Saliency maps, and GradCam |
|
|
Cohan Sujay Carlos, Kiran Sreekumar, Prajwal Bharadwaj Mechanical Chef Private Ltd. A machine capable of cooking Indian and Asian recipes. |
|
|
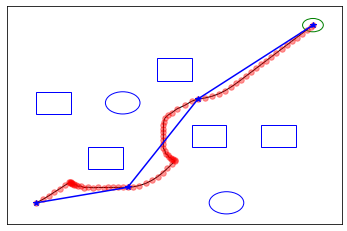
Implementation of RRT, RRT* and RRT# and performance comparison. |
|
|
Abhinandan Krishnan, Prajwal Bharadwaj, Pranay Mathur, Suryaprakash S K Implemented models for human-motion prediction on constrained systems |
|
|
Mobile Manipulation Course Mini-project Tracking obstacles using Laserscan and Pointcloud data |
|
|
Usage of SIFT descriptor for matching key-points across images. Showing SIFT's |
|
|
Map exploration using frontiers and centroids (breadth-first search). |
|
|
Usage of OpenGL and OpenMP to render and move objects in a scene. |
|
Prajwal Bharadwaj Georgia Tech - Mobile Manipulation Course Implemented path planning + state machine for obstacle avoidance. |
|
|
Computational Physics Course Mini-project Developed numerical models for Wave Theory and Corpuscular Theory of light. |
|
Want to make such a website? source code, |